Fig. 1
(a) A Multi Electrode Array (MEA) showing the electrodes. (b) Electrodes in the centre of the MEA seen under an optical microscope (c) An MEA at × 40 magnification, showing neuronal cells in close proximity to an electrode
With the MEA it is possible to separate the firings of small groups of neurons by monitoring the output signals on the electrodes. Thereby a picture of the global activity of the brain network can be formed. It is also possible to electrically stimulate the culture via any of the electrodes to induce neural activity. The multi-electrode array therefore forms a bi-directional interface with the cultured neurons [3, 4].
The cultured brain is, typically after 7–10 days, coupled to its physical robot body [5]. Sensory data fed back from the robot is delivered to the culture, thereby closing the robot-culture loop. The processing of signals can be broken down into two discrete sections (a) ‘culture to robot’, in which live neuronal activity is used as the decision making mechanism for robot control, and (b) ‘robot to culture’, which involves an input mapping process, from robot sensor to stimulate the culture.
The actual number of neurons in a brain depends on natural density variations in seeding the culture in the first place. The electrochemical activity of the culture is sampled and is used as input to the robot’s wheels. The robot’s (ultrasonic) sensor readings are converted into stimulation signals received by the culture, closing the feedback loop.
Once the brain has grown for several days, an existing neuronal pathway through the culture is identified by searching for strong relationships between (input–output) pairs of electrodes. A rough input–output response map of the culture can be created by cycling through the electrodes in turn. In this way, a suitable input/output electrode pair can be chosen in order to provide an initial decision making pathway for the robot. This is then employed to control the robot body—for example if the ultrasonic sensor is active and we wish the response to cause the robot to turn away from the object being located ultrasonically (possibly a wall) in order to keep moving.
For experimentation purposes at this time, the robot is required to follow a forward path until it nears a wall, at which point the front sonar value decreases below a threshold, triggering a stimulating pulse. If the responding/output electrode registers activity within a few milliseconds then the robot turns to avoid the wall. The most relevant result is the occurrence of the chain of events: wall detection–stimulation–response. However from a neurological perspective it is also interesting to speculate why there is activity on the response electrode when no stimulating pulse has been applied.
The cultured brain acts as the sole decision making entity within the overall feedback loop, any computers involved are merely employed for networking arrangements. Clearly one important aspect involves neural pathway changes, with respect to time, in the culture between the stimulating and recording electrodes. Learning and memory investigations are generally at an early stage. However the robot can be witnessed to improve its performance over time in terms of its wall avoidance ability in the sense that neural pathways that bring about a satisfactory action tend to strengthen purely though the process of being habitually performed—learning due to habit.
The number of variables involved is considerable and the plasticity process, which occurs over quite a period of time, is dependent on such factors as initial seeding and growth near electrodes as well as environmental transients such as temperature and humidity. Learning by reinforcement—rewarding good actions and punishing bad is merely investigative research at this time.
We have witnessed through this research that a robot can successfully have a biological brain with which to make its ‘decisions’. The size of the culture is merely due to the present day limitations of the experimentation described. Indeed 3 dimensional structures are presently being investigated. Increasing the complexity from 2 dimensions to 3 dimensions realises a figure of over 30 million neurons for the 3 dimensional case—not yet reaching the 100 billion neurons of a perfect human brain, but well in tune with the brain size of many other animals.
Not only is the number of cultured neurons increasing, but the range of sensory input is being expanded to include audio and visual. Such richness of stimulation will no doubt have a dramatic effect on culture development. The potential of such systems, including the range of tasks they can deal with, also means that the physical body can take on different forms. There is no reason, for example, that the body could not be a two legged walking robot, with rotating head and the ability to walk around.
At present rat neurons are usually employed in studies. However human neurons are also now being cultured, allowing for the possibility of a robot with a human neuron brain. If this brain then consists of billions of neurons, many social and ethical questions will need to be asked [6]. For example—If the robot brain has roughly the same number of human neurons as a typical human brain then could/should it have similar rights to humans? Also—What if such creatures had far more human neurons than in a typical human brain—e.g. a million times more—would they make all future decisions rather than regular humans?
3 Braingate Implant
It is more often the case that brain-computer interfaces are used for therapeutic purposes, to overcome a medical/neurological problem such as Parkinson’s Disease [21, 22] or Epilepsy. However there is also the possibility of employing such technology to give individuals abilities not normally possessed by humans. Human Enhancement!
Some of the most impressive human enhancement research to date in this area has been carried out using the microelectrode array, shown in Fig. 2. The individual electrodes are 1.5 mm long and taper to a tip diameter of a few micrometers. Although a number of trials not using humans as a test subject have occurred, human tests are at present limited to a small group of studies. In some of these the array has been employed in a recording only role, most notably as part of (what was then called) the ‘Braingate’ system.
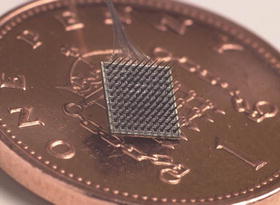
Fig. 2
A 100 electrode, 4 × 4 mm Microelectrode Array, shown on a UK 1 pence piece for scale
Electrical activity from a few neurons monitored by the array electrodes was decoded into a signal to direct cursor movement. This enabled an individual to position a cursor on a computer screen, using neural signals for control combined with visual feedback. The same technique was later employed to allow the individual recipient, who was paralysed, to operate a robot arm [7, 8].
The first use of the Braingate microelectrode array (shown in Fig. 2) in a human has though considerably broader implications which extend the capabilities of the human recipient. The array was implanted into the median nerve fibers of a healthy human individual (the author) during two hours of neurosurgery in order to test bidirectional functionality in a series of experiments. A stimulation current directly into the nervous system allowed information to be received, while control signals were decoded from neural activity in the region of the electrodes [9, 10]. A number of experimental trials were successfully concluded [11, 12]: In particular:
1.
Extra sensory (ultrasonic) input was successfully implemented.
2.
Extended control of a robotic hand across the internet was achieved, with feedback from the robotic fingertips being sent back as neural stimulation to give a sense of force being applied to an object (this was achieved between Columbia University, New York (USA) and Reading University, England).
3.
A primitive form of telegraphic communication directly between the nervous systems of two humans (the author’s wife assisted) was performed [12].
4.
A wheelchair was successfully driven around by means of neural signals.
5.
The color of jewelry was changed as a result of neural signals—also the behavior of a collection of small robots.
In all of the above cases it can be regarded that the trial proved useful for purely therapeutic reasons, e.g. the ultrasonic sense could be useful for an individual who is blind or the telegraphic communication could be useful for those with certain forms of Motor Neurone Disease. However each trial can also be seen as a potential form of enhancement beyond the human norm for an individual. The author did not need to have the implant for medical purposes to overcome a problem but rather for scientific exploration.
It is clear, from these experiments, that extra sensory input is one practical possibility that has been successfully attempted, however improving memory, thinking in many more dimensions and communication by thought alone are other distinct potential, yet realistic, benefits, with the latter of these also having been investigated to an extent. To be precise—all these things appear to be possible (from a technical viewpoint at least) for humans in general.
An individual human connected in this way can potentially also benefit from some of the advantages of machine/artificial intelligence, for example rapid and highly accurate mathematical abilities in terms of ‘number crunching’, a high speed, almost infinite, internet knowledge base, and accurate long term memory. Humans are also limited in that presently they can only visualise and understand the world around them in terms of a limited 3 dimensional perception, whereas computers are quite capable of dealing with hundreds of dimensions.
The human means of communication, essentially transferring a complex electro-chemical signal from one brain to another via an intermediate, often mechanical slow and error prone medium (e.g. speech), is extremely poor in comparison with technological communication, particularly in terms of speed, power and precision. It is clear that connecting a human brain, by means of an implant, with a computer network could in the long term open up the distinct advantages of machine intelligence, communication and sensing abilities to the implanted individual.
Related posts:
 Pilot Study on the Feasibility of Hybrid Gait Training with Kinesis Overground Robot for Persons with Incomplete Spinal Cord Injury
Pilot Study on the Feasibility of Hybrid Gait Training with Kinesis Overground Robot for Persons with Incomplete Spinal Cord Injury
 Platform and Balance Control Training and Research System Based on FES and Muscle Synergies
Platform and Balance Control Training and Research System Based on FES and Muscle Synergies
 Scaffolds for Neural Signal Acquisition and Analysis
Scaffolds for Neural Signal Acquisition and Analysis
 from the Past: Postprocessing of Classification Scores to Find a More Accurate and Earlier Movement Prediction
from the Past: Postprocessing of Classification Scores to Find a More Accurate and Earlier Movement Prediction
 Sensor Fusion Implemented in the Posture Control of a Bipedal Robot
Sensor Fusion Implemented in the Posture Control of a Bipedal Robot
Stay updated, free articles. Join our Telegram channel

Full access? Get Clinical Tree


